[논문 리뷰 및 구현] AlexNet(2012) 리뷰 및 파이토치(PyTorch) 구현
AlexNet : ImageNet Classification with Deep Convolutional Neural Networks 파이토치(PyTorch) 구현한 피드입니다.
AlexNet
2012년 ILSVRC(ImageNet Large-Scale Visual Recognition Challenge) 대회에서 2위와 큰 차이를 가지고 SOTA(state-of-the-art)를 달성하였습니다.
이 논문으로 인해 CNN이 크게 주목을 받게 되었으며, 이후 비전 분야에서 딥러닝이 보편화되기 시작하였습니다.
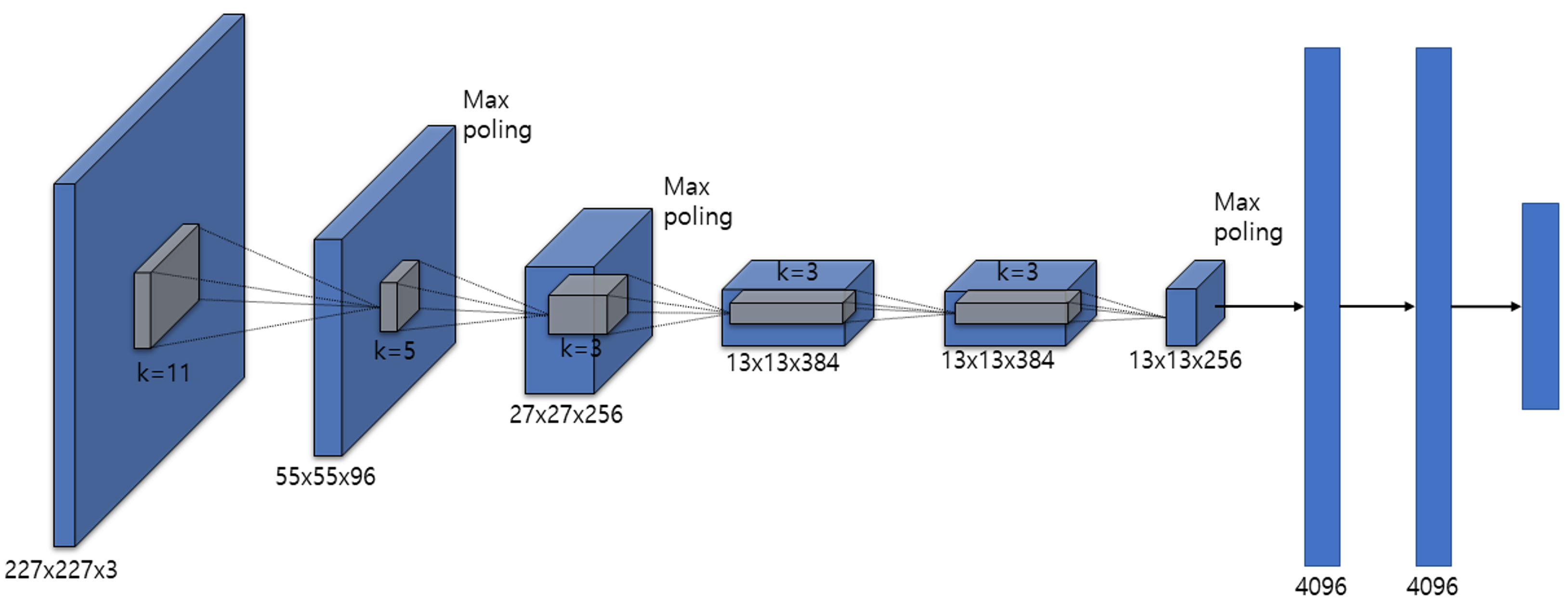
Architecture
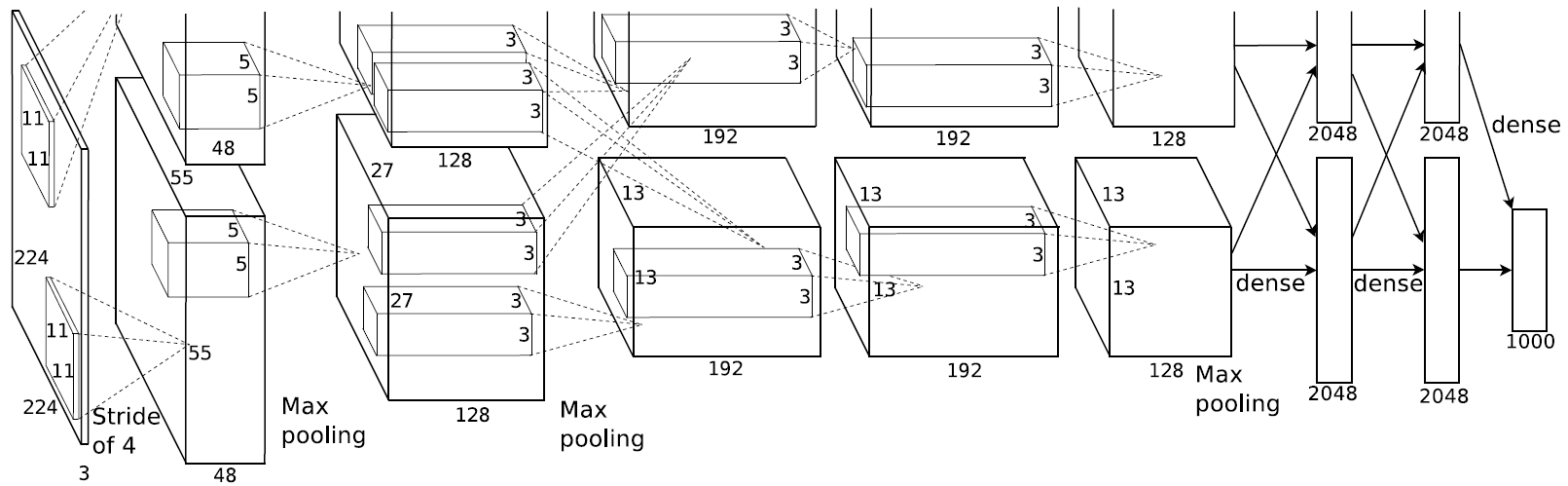
5개의 convolutional layer와 3개의 fully-connected layer로 이루어져 있습니다.
또한 다음의 방법들로 구성되어 있습니다.
- ReLU Nonlinearity
- Multiple GPUs
- Local Response Normalization
- Overlapping Pooling
이외에도 Overfitting을 방지하기 위하여 Data Augmentation을 활용하였으며, fully-connected layers 첫 두 부분에 Dropout을 적용하였습니다.
당시에는 GPU의 자원이 한정되어 있어 병렬로 학습을 진행하였는데, 현재로는 하나의 GPU로도 충분히 학습이 가능하기에 구조를 다음과 같이 바꾸어 구현하였습니다.
PyTorch Implementation
class Alexnet(torch.nn.Module):
def __init__(self, in_channels, num_classes):
super().__init__()
self.layer1 = torch.nn.Sequential(
torch.nn.Conv2d(in_channels, 96, kernel_size=11, stride=4), # conv1
torch.nn.ReLU(inplace=True),
torch.nn.LocalResponseNorm(2),
torch.nn.MaxPool2d(kernel_size=3, stride=2)
)
self.layer2 = torch.nn.Sequential(
torch.nn.Conv2d(96, 256, kernel_size=5, stride=1, padding=2), # conv2
torch.nn.ReLU(inplace=True),
torch.nn.LocalResponseNorm(2),
torch.nn.MaxPool2d(kernel_size=3, stride=2)
)
self.layer3 = torch.nn.Sequential(
torch.nn.Conv2d(256, 384, kernel_size=3, stride=1, padding=1), # conv3
torch.nn.ReLU(inplace=True)
)
self.layer4 = torch.nn.Sequential(
torch.nn.Conv2d(384, 384, kernel_size=3, stride=1, padding=1), # conv4
torch.nn.ReLU(inplace=True)
)
self.layer5 = torch.nn.Sequential(
torch.nn.Conv2d(384, 256, kernel_size=3, stride=1, padding=1), # conv5
torch.nn.ReLU(inplace=True),
torch.nn.MaxPool2d(kernel_size=3, stride=2)
)
self.avgpool = torch.nn.AdaptiveAvgPool2d((6,6))
self.classifier = torch.nn.Sequential(
torch.nn.Linear(6*6*256, 4096), # fc1
torch.nn.ReLU(inplace=True),
torch.nn.Dropout(0.5),
torch.nn.Linear(4096, 4096), # fc2
torch.nn.ReLU(inplace=True),
torch.nn.Dropout(0.5),
torch.nn.Linear(4096, num_classes) # fc3
)
def forward(self, x):
x = self.layer1(x)
x = self.layer2(x)
x = self.layer3(x)
x = self.layer4(x)
x = self.layer5(x)
x = self.avgpool(x)
x = torch.flatten(x, 1)
return self.classifier(x)
직접 ImageNet으로 학습을 하는 것은 한계가 있기에, CIFAR-10으로 진행하였습니다.
Jupyter notebook으로 정말 간단하게 코드를 구현하였고, 다음 링크에서 직접 확인하실 수 있으며 코드를 직접 돌려보실 수 있습니다.
구현 포인트
- ReLU, LRN, Dropout 순서
- MaxPool 위치
- AdaptiveAvgPool
마무리
워낙에 유명한 논문이라서 이미 알고는 있었지만, 논문 하나하나 살펴가면서 ‘왜 이걸 여기에 썼을까?’ 고민하면서 정말 많이 배웠습니다. 특히 당시 시대 상황을 고려하여서 이런 고민을 했었겠구나 생각도 들었으며, Dropout과 ReLU가 어떤 시대적 흐름을 가지고 적용되어왔는지 살펴볼 수 있어 좋았습니다.
물론 LRN이 지금 쓰이지는 않지만, ReLU와의 연관성을 가지고 아이디어를 낸 부분을 보면서 앞으로 연구를 진행함에 있어서 어떤 마인드셋과 인과관계를 거치고 진행해야 하는지 배울 수 있었습니다.
참고자료
https://proceedings.neurips.cc/paper/2012/file/c399862d3b9d6b76c8436e924a68c45b-Paper.pdf
